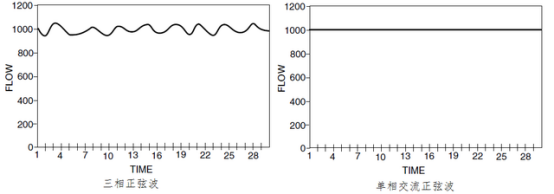
1.現在の周波数
モータの回転は直接電気に関連しており、速度コントローラを介して近代的な制御は、モータの入力に影響を与え、モータ速度を制御するために、オシロスコープで次の図は、単相交流周波数正弦波と三相正弦波の風速と電流の関係でモータを観察する、上下波の頂上は、風速、360度の現在の周波数を表し、米国の現在の周波数は、世界の他の地域では、この、60Hzと呼ばれる毎秒60回です 速度は毎秒50回(50Hz)であり、中央の水平線は、 "ゼロライン "とも呼ばれ、正弦波は毎秒120回それを通過する。
2.マルチスピードモーター
ほとんどのモーターメーカーは複数の回転数を持つモーターを提供しており、これらの回転数を変更するための個別のコントローラーは事実上存在しない。多速度モーターは、タップ巻線または複数の交互巻線を使用し、速度はスイッチで手動で変更するか、回路基板を介して制御することができます。PSCモータは最も一般的で、タップ巻線または交互巻線のいずれかを使用することができ、タップ巻線で作られた隈取磁極モータを使用することができます。
メーカーが提供する回転数の組み合わせには限界があり、実際に必要な回転数が常に得られるとは限らない。これは、いずれにせよ多回転数モーターの限界である。もう1つの欠点は、使用するスイッチを手動で変更して回転数を変更する必要が通常あることである。これらのモーターは、一定時間変動することなく一定量の空気を交換するために使用されるファンと相性がよく、このタイプのファンモーターは比較的経済的である。しかし、回転数に融通が利かないため、正確な風量を合わせるのは難しい。
3.パッシブ装置速度制御
パッシブデバイスによる速度制御は、通常、最も安く導入できますが、電力を浪費するため、多くの場合、最も高くつきます。これは、入力電圧を変化させることでモーターの電磁特性を制御します。これは正弦波全体の振幅を減少させ、実際には周波数の正弦波の高さを変化させます。古い手法ですが、効率が低いため、より効率的で安価なスイッチを使用する、より近代的な手法に取って代わられつつあります。
パッシブ装置速度制御で使用される最も一般的なモータは、PSC、隈取磁極、および三相モータです。どのモータを使用するかにかかわらず、特定のタイプの制御を使用する場合、始動時の負荷はモータの定格を超えてはなりません。これは通常、全速運転トルクの150-200%である。このタイプの制御は一般的に低出力モーターに適用され、通常は負荷や効率を心配する必要はありません。受動素子制御は安価で信頼性が高いが、通常は誰かが手動で操作する必要があり、電圧出力が安定しないため正確な速度を得るのが難しい場合がある。
4.直列抵抗器
変圧器:抵抗器の代わりに使用でき、一般的に同じように動作する。互いに電気的に絶縁された2つのコイルで構成され、一方のコイルの電流を変化させるともう一方のコイルの電圧が変化するように配置されている。電圧の減少または増加がモーターの回転数を変化させる。直列抵抗器に対するトランスの利点は、低速始動時に熱として電力を浪費しないことです。このタイプの制御の欠点は、通常大型であること、手動操作が必要であること、直列抵抗器ほど経済的でないことです。
バリスタ:この装置が作動すると、モータ巻線にかかる電圧が変化し、モータのスリップが発生します。通常、バリスタは、摺動接点と固定接点の 2 つの接点を備えた抵抗素子で構成されています。摺動接点が抵抗素子とともに固定接点に向かって移動すると、素子から離れる電流の距離と速度の両方が変化し、この電流速度の変化は、モーターが直線状に接続されている場合に可変速度に変換することができます。この制御の欠点は、モーターを高速で始動し、その後減速する必要があることである。そうしないと、接点が過熱して焼損してしまう。もう一つの欠点は、バリスタを手動で操作しなければならないことである。
ポテンショメーター:ポテンショメーターはバリスタとよく似ていますが、2つの接点ではなく3つの接点を介して回路に接続される抵抗素子を備えている点が異なります。抵抗素子の端は回路に接続され、3番目の接点は回路の出力に接続されます。通常は、抵抗素子をスライドする取り外し可能な接点です。
5.ソリッドステート制御
過去数年間で、ソリッドステート制御技術とそれを使用してモータを制御する方法は飛躍的に進歩し、現在行われているスピードコントローラの製品開発のほとんどはソリッドステート制御を含み、一部の制御はモータ自体に統合されています。ソリッドステート制御は、多くの場合、非常に信頼性が高く、正確な速度を出すことができ、小数馬力のモーターに使用することが経済的に可能になってきています。以前は、この種の制御装置は一般的に小馬力モータにしか使用されませんでしたが、省電力がその有用性を証明し、エレクトロニクスの進歩とコスト削減がその使用方法を変えました。
ほとんどの異なるタイプのソリッドステート制御は、モータの速度を制御するために周波数および/または電流の変化を組み込んでおり、通常のライン周波数を超えて周波数を変化させることもできます。通常、ソリッドステート制御で使用されるモータは、隈取磁極、PSC、および三相です。これらのタイプのコントローラは、過去に使用されたあまり洗練されていないコントローラよりも精度が高いものの、速度およびトルク制御に関しては、その使用にはまだいくつかの欠点や問題があります。例えば、これらの速度制御のほとんどのメーカーは、高調波周波数を変更することによってモータに与えられる損害について認識していません。
その他に注意すべき欠点としては、規定値を超える電流はモーター巻線のラミネートに大きなダメージを与える可能性があること、インバーターからの電圧スパイクは巻線に大きなダメージを与える可能性があること、高調波はモーター部品ですでにテストされているものよりも高く、ベアリングやラミネートにダメージを与える可能性があること、音や振動が変化して損失が発生する可能性があること、そしてもちろん火災のリスクが高くなることなどが挙げられる。
6.機械装置
機械式装置は、ファンや送風機の回転数を制御する最も古い形式の1つであり、単独で使用することも、他のタイプの空間と組み合わせて使用することもできます。ほとんどの場合、機械式は電子式の速度制御よりも多くの利点があります。例えば、電子機器の故障や専門家による故障箇所の特定を心配する必要がありません。機械式装置の場合、通常はどの部分が故障したかを確認することができ、ほとんどの機械技術者は必要に応じて問題を解決することができます。
残念なことに、通常の運転では、通常、速度は調整できず、機構は潤滑など多くのメンテナンスを必要とする。
プーリー:これはベルトドライブで最も一般的な速度制御方法で、正確な速度を得ることができる完全に調整可能なプーリーもあります。しかし、プーリーの直径を変える場合、通常はベルトの長さも変える必要があります。プーリーは、標準的なモーターが提供する速度よりも低速または高速にする必要がある大型ファンやブロワー、またはダイレクトドライブが使用できない場合に大きな利点があります。また、プーリーのベルト張力が適切である限り、大きな荷重を容易にかけることができます。私たちのほとんどはこのタイプに慣れており、ファンやブロワーの運転中は調整できないことを知っています。
トランスミッション製品(減速機、ギア、クラッチなど):この形式の速度制御は、ファンや送風機には通常使用されないが、検討対象から除外すべきではない。トランスミッション製品は、ファンとは異なり、回転数を落としても負荷が変化しない用途で使用されるため、ほとんどの人がよく知っている。これらは通常信頼性が高いが、非常に高価で面倒な場合が多い。メンテナンス性が高く、回転数を変えるには手動調整が必要な場合が多い。